
3.1.-Desarrollo De Circuitos Neumáticos:
Los elementos básicos de un circuito neumático son:
· El generador de aire comprimido,
es el dispositivo que comprime el aire de la atmósfera hasta que
alcanza la presión de funcionamiento de la instalación. Generalmente se
asocia con un tanque donde se almacena el aire para su posterior
utilización.
Símbolo del compresor

La
mayor parte de los compresores suministran un caudal discontinuo de
aire, de manera que se debe almacenar en un depósito, este sirve para
evitar que los compresores estén en funcionamiento constantemente,
incluso cuando no se necesita gran caudal de aire, también ayudan a
enfriar el aire. Los depósitos generalmente disponen de manómetro que
indica la presión interior, una válvula de seguridad que se dispara en
caso de sobrepresiones y una espita para el desagüe de las
condensaciones que se producen en el interior del depósito.

· Las tuberías y los conductos.
Para transportar el aire es necesario utilizar conductores. Los
conductores utilizados son tuberías metálicas o de polietileno de
presión. El diámetro de las tuberías depende de las necesidades de
caudal que requiere la instalación, teniendo en cuenta la caída de
presión producida por las pérdidas y la longitud de las tuberías.

Para
conectar los tubos nos ayudamos de una regleta de derivación con
enchufes rápidos, sobre la que conectamos los tubos para obtener las
toma de presión necesaria. Se trata de conexiones de seguridad, debe
introducirse el tubo profundamente, y para extraerlos debemos pulsar el
tapón azul hacia abajo.

Generalmente
entre el depósito y el circuito se suele incluir una unidad de
mantenimiento que cuenta con un regulador de presión, un filtro y un
lubricador de aire.

· Los actuadores, como cilindros y motores, que son los encargados de transformar la presión del aire en trabajo útil.

· Los elementos de mando y control con el objetivo de controlar la circulación del aire en una dirección u otra.
Válvula 3/2:
una de sus principales aplicaciones es permitir la circulación de aire
hasta un cilindro de simple efecto, así como su evacuación cuando deja
de estar activado.

·Válvula 5/2: una de sus principales aplicaciones es controlarlos cilindros de doble efecto.


Diseño de circuitos neumáticos.
Existen
dos maneras de controlar un cilindro, control directo y control
indirecto, y nosotros elegiremos el tipo de control según sea nuestra
necesidad, aunque cabe destacar que en el control indirecto no hay
perdidas depresión y por tanto más exactitud.
Control directo.-
En
este tipo de control el pistón esta directamente controlado por la
válvula, en el cual existen pérdidas de presión debidas a que la válvula
tiene un consumo de aire, lo que ocasiona que el cilindro salga con
menor presión a la suministrada inicialmente.
Control indirecto.-
Este
tipo de control utiliza una válvula cuyos accionamientos son
neumáticos, lo que nos permite controlar la presión y con esto hay mayor
exactitud y el vástago del cilindro sale a la presión deseada
Cada elemento debe tener una numeración así como cada una de sus conexiones.

Por ejemplo: la representación completa de las válvulas puede ser:


Por ejemplo: la representación completa de las válvulas puede ser:

El
programa a utilizar para la fabricacon de circuitos neumatcos es festo
fluidsim,y por lo tanto se muestran as partes fundamentales a conocer
del programa,haci como las indicasiones paso a paso para la fabricacion
de circuitos neumaticos sencillos:
Barra de herramientas:

Biblioteca:
Esta área es donde están los elementos ha utilizar para la construcción de circuitos neumáticos.

Zona de trabajo: como el nombre lo indica esta área nos indica nuestra zona de trabajo.


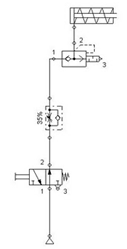
seleccionar válvula 3/n vías y un cilindro de simple efecto.

Esquema 1válvula 3/n vías y cilindro de simple efecto

Realizada la configuración de la válvula, queda de la siguiente manera:

Posteriormente, se da doble clic en la conexión abierta número 3, y en la ventana desplegada en el menú cierre de conexión se selecciona el silenciador





Esquema 1válvula 3/n vías y cilindro de simple efecto
seleccionar
tipos de accionamiento para la válvula, esto se consigue dando doble
clic sobre la válvula, seleccionando en el menú de la izquierda y de la
derecha, los tipos de accionamientos requeridos según sea el caso. Para
este caso, se selecciono un accionamiento mecánico (esfuerzo) del tipo
push button, para el accionamiento izquierdo, y retorno de muelle, para
el accionamiento derecho.

Realizada la configuración de la válvula, queda de la siguiente manera:
Posteriormente, se da doble clic en la conexión abierta número 3, y en la ventana desplegada en el menú cierre de conexión se selecciona el silenciador

En la conexión número 3 siempre se colocará un silenciador.
Se
selecciona una fuente de aire comprimido del menú de elementos y se
procede a conectarla a la conexión número 1 de la válvula, y la conexión
número 2 al cilindro de simple efecto, quedando:
A la conexión número 1 siempre irá conectada la fuente de aire comprimido
En
la barra de icono Oprimir el botón “play”, para proceder con la
simulación, Oprimimos el push button, accionamiento derecho de la
válvula

Observamos
como el vástago del cilindro cambia de posición y sale ya que al
accionar el esfuerzo mecánico se permite el flujo de aire hacia el
cilindro, de la conexión 1 a la 2 de la válvula y de esta al cilindro.

A continuación se presentaran una serie de ejercicios para resolver:
Ejercicios:
1)
funcionamiento de un cilindro de simple efecto. Mando neumático desde
dos posiciones diferentes (2 válvulas) mediante accionamiento simultáneo
(y) de dichas válvulas. Válvulas 3/2 nc de accionamiento manual con
retorno por muelle a posición de reposo.
2)
funcionamiento de un cilindro de simple efecto. Mando neumático desde
dos posiciones diferentes (2 válvulas) mediante accionamiento, no
necesariamente, simultáneo (o). Válvulas 3/2 nc de accionamiento manual
con retorno por muelle a posición de reposo.
3)
movimiento de un cilindro de simple efecto. Mando neumático. Válvula
3/2 na de accionamiento manual con retorno por muelle a posición de
reposo. Al accionar el pulsador de marcha el cilindro retrocede rápido y
avanza lento.
4)
mando neumático de un cilindro de doble efecto mediante dos pulsadores
avance-retroceso. El cilindro debe tener bloqueo instantáneo. Válvulas
3/2 n.c. accionamiento manual con retorno por muelle a posición de
reposo para los pulsadores.
5) control
neumático de un cilindro de doble efecto, con regulación de
velocidades. Movimiento automático o semiautomático, controlado por dos
válvulas.
Válvula para el accionamiento semiautomático: 3/2 n.c. pulsador manual, monoestable.
Válvula
para el accionamiento automático: 3/2 n.c. pulsador manual, con
enclavamiento. Los finales de carrera utilizados, serán válvulas 3/2
n.c. pilotadas por rodillos.
Solución:
Problema 1)

Problema 2)

Problema 3)
Problema 4)

Problema 5)

3.1:1 Circuitos Combinatorios (c.c.)
Un
circuito combinatorio es un arreglo de compuertas lógicas con un
conjunto de entradas y salidas, el análisis de un c.c. inicia con un
diagrama de circuito lógico y termina con el conjunto de funciones
booleanas o una tabla de verdad.
El
álgebra de boole sólo opera con dos números (valores), el 0 y el 1, en
base a esto, pueden calcularse analíticamente las funciones lógicas
para luego utilizarlas en el equipo neumático de mando. Las funciones
básicas de esta álgebra son las funciones and, or y not.
Función and (y):
La
función y produce una señal de salida y cuando están presentes todas
las señales de entrada, si falta una de las señales de entrada, no se
produce ninguna señal de salida, se puede realizarse en un equipo
neumático mediante la conexión en serie de dos válvulas de 3/2 vías o
con una válvula de simultaneidad (solo para 2 entradas).
Tabla de verdad and (y):

Su función algebraica se denomina de la siguiente manera: f = x y
Ejemplo fluidsim usando elemento and (y):
1) El punto principal ha conocer es elemento and (y), dentro del programa fluidsim lo reconoceremos de la siguiente manera:

2) Se continuara con la construcción del circuito, utilizando las bases dadas antes.

VIDEOTUTORIAL AND:
Función or (o):
En la función o, se tiene una señal de salida y, si en la entrada está
presente al menos una de las posibles señales de entrada x funciona,
puede ampliarse a n elementos. Se realiza sencillamente con válvulas
selectoras.

Su función algebraica se denomina de la siguiente manera = x + y
Ejemplo fluidsim usando elemento or(o):
1) El punto principal ha conocer es elemento or (o), dentro del programa fluidsim lo reconoceremos de la siguiente manera:

2) Se continuara con la construcción del circuito:

En
la función not, la señal de salida y está presente, cuando no están
presentes ninguna de las señales de entrada x, esta función puede
realizarse con una válvula de 3/2 vías normalmente abierta. Si no se
halla presente ninguna señal de entrada x (ningún accionamiento de la
válvula), existe la señal de salida y, el aire comprimido fluye a través
de la válvula. La función no se designa también como negación.
Tabla de verdad not:

Su función algebraica se denomina de la siguiente manera: se identifica por el signo - sobre la señal indica la negación o inversión.
MAPA CONCEPTUAL:

3.1.2 Circuitos Secuenciales:
El
fin de este es mantener el orden en el que deben ejecutarse varias
acciones de una automatización, asignando a los actuadores finales
(cilindros neumáticos) una letra mayúscula. Así mismo, se utiliza un
signo + si el vástago del cilindro está extendido y un signo – si el
vástago está retraído.
MÉTODO DE CASCADA:
Es
un método no intuitivo de desarrollar circuitos neumáticos a partir de
una secuencia dada. El método consiste en separar la secuencia en
grupos donde, no se repita ninguna letra de la secuencia, con el fin de
utilizar el menor número de válvulas de alimentación y tener un orden
estructurado al desarrollar dicho circuito.es nombrada así debido a que
sus válvulas de presión (4/2 ó 5/2) se conectan en serie.
A
continuación se describen los pasos necesarios para resolver una
secuencia de operaciones que involucra actuadores neumáticos o electro
neumáticos:
1)
Analizar el problema y establecer el número de actuadores
referenciándolos con letras a cada uno, es decir, para el primer
actuador se referenciaría con la letra ‘A’, para el segundo con la letra
‘B’, y así sucesivamente y a su vez identificar los sensores; para
estos se usa la letra ‘S’, y para diferenciarlos, se enumeran de manera
consecutiva, ‘S0’ para el primer sensor, ‘S1’ para el segundo y así
sucesivamente
2)
Determinar la secuencia correcta a diseñar teniendo en cuenta que para
el desplazamiento hacia afuera de los actuadores se simboliza con el
signo (+), y para el retorno de los actuadores se simboliza con el signo
(-).

3)
Dividir la secuencia en grupos teniendo en cuenta que: un grupo no
puede contener más de un movimiento del mismo actuador , no se puede
tener A+ y A- en el mismo grupo y además, cada grupo debe contener la
mayor cantidad de movimientos de actuadores posible.

4)
Identificar cuáles son los sensores que hacen los cambios de grupos y
al mismo tiempo generan el primer movimiento del grupo simbolizado con
una flecha por debajo con la referencia del sensor correspondiente, y
también identificar que sensores generan los movimientos internos del
grupo simbolizados con una flecha por arriba con la referencia del
sensor adecuado.
5) Establecer el número de válvulas de memoria (5/2) que se necesitan para generar los grupos obtenidos con la siguiente fórmula:

Nv: es el número de válvulas
Ng. es el número de grupos
6)
Ya teniendo el número de válvulas de memoria y los cambios de
movimiento se crea el esquema general de funcionamiento del circuito.
EJEMPLO:



MÉTODO PASO A PASO:
Este
método consiste en obtener tantos grupos como movimientos se tenga
dentro de una secuencia, este método ofrece un menor tiempo de respuesta
ya que los movimientos son generados por una válvula 3/2 de memoria
alimentada directamente dela red; pero tiene la desventaja de usar mas
válvulas de memoria en comparación al método cascada y no se puede usar
cuando se tengan solo dos movimiento ya que cada salida debe borrar la
anterior y se bloquearían.
1)
Analizar el problema e identificar el número de actuadores con su
respectiva simbología como se describió en el método cascada, e
identificar los sensores igualmente con su respectiva simbología.
2) Se deduce la secuencia adecuada a diseñar como se hizo en el segundo paso del método cascada.
3)
Dividir la secuencia en tantos pasos como movimientos tenga el proceso e
identificar que sensor acciona el paso dependiendo del último
movimiento y con esto se puede saber el número de válvulas de memoria
que es igual al número de pasos.
4)
teniendo el número de válvulas de memoria y los cambios de movimiento
se crea el esquema general de funcionamiento del circuito.

3.2 DESAROLLO DE CIRCUITOS ELECTRONEUMATICOS
En
los siguientes circuitos electro neumáticos se muestra a detalle el
cómo realizar un circuito electro neumático realizando primeramente los
más básicos y posteriormente los más complejos.
CIRCUITOS ELECTRONEUMATICOS.
(CIRCUITOS BASICOS).
I.MANDO DE UN CILINDRO DE SIMPLE EFECTO.
El vástago de un cilindro de simple efecto ha de salir al ser accionado de un pulsador. Al
Soltar el pulsador, el émbolo ha de regresar a la posición final trasera.

SOLUCIÓN 1. – MANDO DIRECTO
Por
el contacto del pulsador S1, el circuito queda cerrado. En la bobina
1Y se genera un campo magnético. La armadura en la bobina invierte la
válvula y franquea el paso para el aire comprimido. Este fluye de (1)
hacia (2) llegando al cilindro, cuyo émbolo es enviado a la posición de
salida del vástago.
Soltando
el pulsador S1, el circuito queda interrumpido. El (1Y) campo
magnético en la bobina desaparece, la válvula distribuidora 3/2 vuelve a
la posición inicial, el émbolo regresa a la posición retraída.
SOLUCIÓN 2.- MANDO INDIRECTO
En
la segunda solución, un relé K1 es pilotado por el pulsador S1. A
través de un contacto de cierre de K1 queda pilotada la bobina 1Y
(pilotaje indirecto). Por lo demás el desarrollo es idéntico a la
solución 1.
La
solución 2 es preciso aplicarla cuando la potencia de ruptura de los
transmisores de señales (S1) no basta para conmutar la bobina 1Y, o
cuando el trabajo siguiente sucede con otra tensión (220 V).
Por
lo demás es precisa la conexión a través de relés, cuando hacen falta
combinaciones y enclavamientos. En mandos con varios accionamientos K1,
K2, K3, etc. resulta más fácil la lectura de esquemas y la
localización de errores, al indicar en qué circuito se encuentran los
contactos de apertura o de cierre de los accionamientos.
En los siguientes ejemplos se exponen las dos soluciones, con mando directo e indirecto.
II.MANDO DE UN CILINDRO DE DOBLE EFECTO.
El
vástago de un cilindro de doble efecto ha de salir, como en el caso
anterior, accionando un pulsador; soltando el pulsador ha de regresar a
la posición inicial.

Solución:
El mando del cilindro de doble efecto tiene lugar a través de una válvula distribuidora 5/2.
Por
el accionamiento del pulsador S1, la bobina 1Y se excita. A través de
un servo pilotaje por aire comprimido es gobernada la válvula
distribuidora. El émbolo marcha a la posición anterior. Al soltar S1
surte efecto el muelle recuperador de la válvula distribuidora. El
émbolo regresa a la posición inicial.
III.CONEXIÓN EN PARALELO “O” (CILINDRO DE SIMPLE Ó DE DOBLE EFECTO).
La
posición de reposo del cilindro es con el vástago fuera. El envío del
émbolo a la posición posterior ha de ser posible desde dos puntos.

Solución:
Por
el accionamiento del pulsador S1 ó S2 queda excitada la bobina 1Y. La
válvula distribuidora (3/2 ó 5/2) conmuta, el émbolo retrocede hasta el
inicio de carrera. Soltando el o los pulsadores accionados queda
anulada la señal en 1Y, la válvula conmuta y el émbolo vuelve a la
posición inicial.
IV.CONEXIÓN EN SERIE “Y” (CILINDRO DE SIMPLE Ó DE DOBLE EFECTO).
La posición base del cilindro es la posterior. Un vástago debe salir, al ser accionados dos pulsadores simultáneamente.

Solución:
Al
accionar los pulsadores S1 y S2, el circuito se cierra. Queda excitada
la bobina 1Y. La válvula distribuidora (3/2 ó 4/2) conmuta, el émbolo
se mueve hacia la posición final delantera.
Soltando
uno o los dos pulsadores queda anulada la señal en 1Y, la válvula se
reposiciona y el émbolo vuelve a la posición inicial.
V.MANDO INDEPENDIENTE EN AMBOS LADOS.
El
émbolo del cilindro ha de avanzar a la posición anterior previo
accionamiento del pulsador S1, allí ha de permanecer hasta que es
accionada la carrera de retroceso a través del pulsador S2.

Solución:
Al
accionar el pulsador S1, la bobina 1Y1 se excita. La válvula se
invierte y permanece en esta posición hasta que a través del pulsador S2
actúa una señal sobre la bobina 1Y2. El vástago sale. Cuando la bobina
1Y2 se excita, la válvula distribuidora 3/2 ó 5/2 vuelve a la posición
de dibujo y el émbolo regresa a la posición inicial (inicio de
carrera).
VI.RETORNO AUTOMÁTICO DE UN CILINDRO
El
émbolo ha de avanzar a la posición anterior previo accionamiento de un
pulsador. Una vez alcanzada esta situación debe volver nuevamente a la
posición de partida.

Solución:
Por
el accionamiento del pulsador S1 queda excitada la bobina 1Y1. La
válvula se invierte. El émbolo avanza a la posición final delantera. Una
vez ha alcanzado la posición anterior, accionará el final de carrera
1S ubicado allí. Este final de carrera 1S excita a la bobina 1Y2, la
válvula vuelve a la posición de dibujo y el émbolo puede regresar a su
posición base. La condición es que el pulsador S1 no esté presionado.
VII.MOVIMIENTO OSCILANTE DE UN CILINDRO DE DOBLE EFECTO
Después
de conectado un interruptor ha de salir y entrar el vástago
continuamente, hasta que vuelva a quedar desconectado el interruptor. El
émbolo ha de volver a ocupar su posición inicial.

Solución:
En
ambas posiciones finales del vástago se encuentran los finales de
carrera 1S1 y 1S2, accionados mecánicamente. Estos emiten
respectivamente una señal para conseguir la carrera de retroceso y de
avance respectivamente. Pero el pulsador S1 actúa solamente si el
interruptor S3 está conectado. El émbolo por consiguiente ejecuta un
movimiento de vaivén. Al volver a quedar
desconectado
el interruptor S3, ninguna señal puede alcanzar a la bobina 1Y1, es
decir el émbolo permanece parado en la posición inicio de carrera.
Circuito de autor retención.
Se
trata de un circuito eléctrico que cierra para memorizar señales. Se
utilizan en mandos electro neumáticos, cuando determinadas señales
eléctricas han de quedar memorizadas. El memorizado de señales, en
determinados casos, puede realizarse mediante electroválvulas neumáticas
con reposición por muelle (monoestables). En los mandos más amplios
(cadenas rítmicas) puede aplicarse la función de memoria tanto en la
parte neumática como en la eléctrica, según constitución, y también en
ambos ámbitos.
En la técnica de mando se habla de dos circuitos de autorretención, con conexión (CON dominante) o desconexión (DES dominante).

FUNCIONAMIENTO DEL CIRCUITO DE AUTORRETENCIÓN:
En el circuito 1, a través del pulsador CON queda excitado el relé K1 que activa la válvula
1Y.
Para que al soltar el pulsador CON permanezca excitado el relé, ha de
seguir conectado. Para ello, en paralelo al circuito 1, se dispone un
contacto de cierre de K1 (circuito 2, figura 7-8).
Por
esta conexión en paralelo se logra que al soltar el pulsador CON no
quede desactivado el relé K1. Para que el circuito de auto retención
pueda quedar nuevamente borrado, es preciso montar un pulsador de
desconexión DES. Este pulsador DES se dispone en la solución “CON
dominante” en el circuito 2. En la solución desconexión dominante el
pulsador DES se ubica dentro del circuito 1 tal como se observa en la
figura 7-8. Por lo tanto para que domine la conexión o la desconexión es
determinante la posición de montaje del pulsador DES. Si el pulsador
DES está conectado en serie con el contacto de cierre K1, siempre es
dominante la señal CON. Si el pulsador DES está conectado en serie con
el pulsador CON , el comportamiento del circuito es DES dominante.
RETROCESO DE UN CILINDRO CON PULSADORES Y MEMORIA ELÉCTRICA.
El
vástago de un cilindro de simple o de doble efecto ha de salir y
permanecer en la posición delantera, hasta que una segunda señal lleve
al émbolo a la posición inicial.

Solución:
A
través del pulsador S1 se cierra el circuito 1 y es excitado el relé
K1. Paralelo a este circuito 1 está montado, en el circuito 2, un
contacto de cierre del relé K1, que mantiene la alimentación de
corriente para el relé K1. El contacto de cierre K1, en el circuito 3
hace que se excite la bobina 1Y. El émbolo avanza a la posición final
delantera. Mediante el pulsador S2 el circuito 1 quedando interrumpido
hacia el relé K1. Todas las funciones del relé K1 retornan a la posición
inicial. Por ello también se interrumpe el circuito hacia la bobina
1Y. El muelle de la válvula distribuidora la hace retornar y el émbolo
regresará también a la posición inicial.
Mandos con comportamiento temporizado.
Los
mandos, que tienen prescritos un desarrollo cronológico muy
determinado, deben estar equipados con relés temporizadores eléctricos.
Existen mandos únicamente influidos por el tiempo o bien por
combinaciones de la consulta del espacio y el tiempo. Los relés de
tiempo, que se utilizan hoy predominantemente como relés temporizadores
electrónicos, tienen como ya se ha indicado, dos comportamientos
temporales fundamentales:
Relé temporizador con retardo de excitación
Relé temporizador con retardo de des excitación.
Mando de un cilindro de doble efecto con temporización (retardo de excitación).
El
émbolo tiene que avanzar previo accionamiento del pulsador S1. En el
final de carrera debe parar 10 segundos y luego regresar
automáticamente. En la posición anterior se halla el final de carrera
1S.

Solución:
Por
el accionamiento del pulsador manual S1, el relé K1 se excita. El
contacto de cierre del relé K1 está unido con la bobina 1Y1. Por la
conexión del contacto de cierre, la electroválvula queda invertida. El
vástago del cilindro avanza a la posición final de carrera. En esta
posición queda accionado el final de carrera 1S. Este final de carrera
conecta el relé temporizador K2 (con retardo de excitación).
Transcurridos 10 segundos el contacto de cierre del relé temporizador
excita la bobina 1Y2 de la válvula distribuidora. La válvula retorna a
su posición inicial, por lo que el émbolo regresa a la posición de
inicio de carrera.
Mando de un cilindro de doble efecto con temporización (retardo de des excitación).
El
émbolo tiene que avanzar previo accionamiento del pulsador S1. En el
final de carrera debe parar 10 segundos y luego regresar
automáticamente. En la posición anterior se encuentra el final de
carrera 1S.

Solución:
Por
medio del pulsador de marcha S1, el relé K1 queda excitado. El
contacto de cierre de la línea 3 del relé K1 conecta la bobina 1Y1.
Debido al impulso, la válvula distribuidora 5/2 invierte y el émbolo
del cilindro avanza a la posición anterior. La bobina 1Y2 está sin
corriente, porque el contacto de apertura (línea 4) del relé
temporizador K2 está desconectado. (El conmutador K2 del circuito 4
está dibujado en la posición en que su relé correspondiente no está
excitado). La señal de entrada desaparece cuando se acciona el final de
carrera 1S. Transcurrido el tiempo ajustado de 10 segundos, el
contacto de apertura del relé temporizador K2 conecta la bobina 1Y2,
por lo que la válvula distribuidora 5/2 manda el émbolo del cilindro de
doble efecto a la posición de inicio.
Diseño de circuitos
El diseño de los circuitos puede realizarse de dos maneras:
1. El método puramente intuitivo.
2. El método sistemático.
Para
ambos métodos es necesario que previamente se establezca el enunciado
del problema, es decir se planteen los requerimientos del proceso a
resolver. En el primer método se acomete el problema únicamente
apoyándose en la intuición o en la experiencia. Cuando se trata de
automatismos complejos se requiere en la realización de los mandos
cierta experiencia y también método.
El
segundo método, apoyándose en directrices determinadas, supone una
realización sistemática de los mandos, siguiendo determinadas
directrices.
Ambos métodos deberán conducir a circuitos de funcionamiento seguro.
No
obstante, en el proyecto de mandos electroneumáticos se recomienda el
segundo método, que al observar determinadas directrices, garantiza una
mayor seguridad.
A continuación se desarrolla la elaboración de circuitos de forma sistemática, mediante ejemplos.
Ejemplo 1: Manipulación de paquetes
Los
paquetes son alimentados desde el cargador por gravedad mediante el
cilindro 1A, que los lleva hasta la posición dónde son empujados por el
cilindro 2A para el llenado de la caja donde van embalados. La
secuencia deseada es: 1A+, 2A+, 1A-, 2A-. La solución del mando se
resuelve en primer término con memorización neumática y después con
eléctrica, realizando el diseño paso a paso. La memorización neumática
requiere válvulas biestables o de doble bobina, mientras que la
eléctrica utiliza válvulas monoestables o de bobina única.

Como
se observa a continuación se diseñan de manera separada los circuitos
de mando, es decir, los que realizan las señales, y los circuitos
principales, o sea, los que ejecutan los movimientos.
3.2.1.- CIRCUITOS COMBINADOS (ÁLGEBRA DE BOOLE) :
En
una computadora únicamente existe dos posibilidades: utilizar el 0 o
bien el 1 para representar el objeto más pequeño e indivisible. Todos
los programas y datos se reducen a combinaciones en bits. Un bit en una
parte de un circuito puede producir voltaje mientras que en otra parte
no lo hace. Razón por la cual se requieren dos niveles de voltaje:
1 = voltaje alto
0 = voltaje bajo
Los
datos de salida de un circuito combinatorio están determinados por la
combinación de datos de entrada. Un circuito combinatorio no tiene
memoria por lo tanto los datos de entrada anteriores y estado existente
no afectan los datos de salida del circuito.
Los
circuitos combinatorios se construyen por medio de compuertas lógicas
que son capaces de hacer cambios en el nivel de voltaje del cuerpo.
Un
circuito combinatorio es aquel cuya salida se puede obtener de una
única forma, además los circuitos que utilizan las compuertas lógicas,
se los puede también representar mediante las expresiones booleanas que
utilizan los símbolos -, Ú, Ù, para las compuertas NOT, OR y AND respectivamente.
Las
tablas de verdad de las expresiones booleanas serán iguales a las
tablas con las que trabajamos en el capítulo anterior, con esto quiero
decir que se deberá evaluar primero las compuertas más internas hasta
llegar a la compuerta principal.
Ejemplo:
Dado el circuito:
La expresión booleana que la representa será:

La expresión booleana que la representa será:
(x1 ^ x2) ^ (x1 v x3).
LA

EJEMPLO DE CIRCUITO DE ALGEBRA BOOLEANA EN EL FLUIDSIM.
SE DESEA UN
CIRCUITO PARA IMPLEMENTAR LA ALARMA DE SEGURIDAD DE UN CARRO DE 2
PUERTAS SE DISPONE DE UN CONJUNTO DE INTERRUPTORES LOS CUALES SE HAN
DISPUESTO DE LA SIG, MANERA.
a) UN INTERRUPTOR SE HA DE PRENDERCE SI PONEMOS EL CARRO EN VELOCIDAD.
b) UN INTERRUPTOR SE HA PUESTO BAJO CADA UNO DE LOS ASIENTOS Y PRENDERA SI ALGIGUIEN SE SIENTA
c) UN INTERUPTOR SE HA PUESTO EN CADA ACIENTO Y PRENDERA SI EL CINTURON ES ABROCHADO.
LA ALARMA
FUNCIONARA CUANDO SE PRENDE LA LLEVA Y PONGAMOS UN CAMBIO DE VELOCIDAD Y
SE COMPRUEBA QUE CUALQUIER DE LOS ACIENTOS SE OCUPA Y EL
CORRESPONDIENTE CINTURRON NO ESTE AJUSTADO.
M= ALARMA
A= ASIENTO DERECHO
B= ASIENTO IZQUIERDO
C= SENDOR DE ASIENTO
D= SENSOR DE CAJA DE VELOCIDAD
G= SENSOR DE CINTO DERECHO
H= SENSOR DE CINTO IZQUIERDO.
SOLUCION.
DIAGRAMA ELECTRICO.

DIAGRAMA DE CIRCUITO EN EL INTERIOR DE ALGEBRA BOOLEANA.

existen una
gran variedad de formas de conectar un mismo circuito, todas dependiendo
de la logica que logre desarollar la persona, esta es solo una de
tantas combinaciones para este circuito.
3.2.2.- CIRCUITOS SECUENSIALES USANDO METODO DE CASCADA PASO A PASO:
SOLUCIÓN 1 (MEMORIA NEUMÁTICA)
Paso 1:
Trazado
de los circuitos de mando y principal (1 y 5). En el circuito de
mando, el relé K1 es excitado a través del pulsador S1 y a través de la
“consulta” por medio del final de carrera 2S1. Se denomina “consulta” a
conocer de alguna manera si se ha producido un hecho antes de
verificarse el siguiente. En este caso se trata de saber si el vástago
de 2A ha retornado a su posición inicial antes de que salga el de 1A. En
el circuito principal, el contacto de cierre de K1 cierra el circuito.
La bobina 1Y1 se excita, invierte la válvula 1V y el vástago del
cilindro 1A sale.

Paso 2:
Trazado
de los segundos circuitos de mando y principal (2 y 6). En la posición
anterior del cilindro 1A es accionado el final de carrera 1S2. A
través de éste se excita el relé K2. Un contacto de cierre de K2 excita
la bobina 2Y1, la válvula 2V se invierte, el vástago del cilindro 2A
sale.

Paso 3:
Trazado
de los terceros circuitos de mando y principal (3 y 7). El cilindro 2A
ha empujado el paquete hacia la rampa. En su posición anterior el
cilindro 2A acciona y cierra el final de carrera 2S2, se excita el relé
K3 y el contacto de cierre de K3 conecta la bobina 1Y2. La válvula 1V
vuelve a su posición de dibujo. El émbolo del cilindro 1A puede regresar
a su posición posterior.

Paso 4:
Trazado
de los cuartos circuitos de mando y principal (4 y 8). El cilindro 1A
acciona el final de carrera 1S1 situado en la posición posterior. Se
excita el relé K4. El contacto de cierre de K4 conecta a la bobina 2Y2.
La válvula 2V regresa a su posición de dibujo. El cilindro 2A regresa y
vuelve a accionar el final de carrera 2S1. Al llegar un nuevo paquete
todo se encuentra como al
Principio dispuesto a comenzar un nuevo ciclo cuando se pulse S1.

Situación de inicio y final de ciclo.

SOLUCIÓN 2 (MEMORIA ELÉCTRICA)
El
sistema utiliza, como ya se dijo anteriormente válvulas distribuidoras
5/2 monoestables con una bobina. La memorización de las señales se
efectúa mediante circuitos de autor retención. En la figura se indica la
posición de los finales de carrera eléctricos.

Paso 1: (salida del vástago de 1A).
Se
trazan los circuitos de mando y principal para el primer relé K1 y
para la bobina 1Y. A través del final de carrera 2S1 (sensor de
posición tipo reed), que está activado, ya que el cilindro 2A está en
el inicio de carrera, así como del pulsador de marcha S1, queda cerrado
el circuito 1 con el relé K1. En paralelo a este circuito es tendido
el de autor retención, precisamente con un contacto de cierre K1. De
este modo se autor retiene el relé K1. Un contacto de cierre de k1,
unido en el circuito principal con la bobina 1Y, efectúa la inversión
de la válvula distribuidora 1Y2. El vástago del cilindro 1A sale.
En
el esquema eléctrico se ha mantenido siempre la simbología en el
momento inicial sin simular los cambios que van sucediendo en dicho
circuito. Es decir se representa tal y como se entregaría el plano de
montaje, sin carga eléctrica.

Paso 2:
Se
traza el 2º circuito de mando con el relé K2 y el 2º principal con la
bobina 2Y. El cilindro 1A, en la posición final de carrera acciona 1S2
que efectúa la excitación de K2 en el circuito 3. En paralelo se
encuentra la autor retención para el relé K2 a través de un contacto de
cierre de K2. En el circuito principal, por el cierre del contacto de
cierre K2 queda excitada la bobina 2Y, la válvula distribuidora 2Y
conmuta, el vástago del cilindro 2A sale.
En
la línea 3 se coloca en serie un contacto de cierre K1 para que el
proceso sea secuencial y no se active K2 a menos que se haya activado K1
en el paso inmediatamente anterior. De esta forma se consigue que,
cualquier eventualidad que hiciera que el vástago del cilindro 1ª
estuviera fuera en el inicio de ciclo, no alteraría la secuencia
correcta de funcionamiento.

Paso 3:
En este paso tiene que retornar el vástago del cilindro 1A, para lo cual se descalcita el relé K1.
Cuando
el cilindro 2A llega al final de carrera acciona 2S2 (final de carrera
tipo red), con la señal de dicho sensor se cierra el circuito 5 de
mando accionando el relé K3. Por medio de un contacto normalmente
cerrado, gobernado por dicho relé (K3), colocado en serie en la línea 1
de mando se abre el circuito 1, desconectando la memoria eléctrica.
Como consecuencia se abre el contacto K1 del circuito principal y se
desactiva 1Y. La electroválvula entonces vuelve a su posición estable
por la acción del muelle y el vástago de 1A comienza a entrar. En la
línea 5 se dispone un contacto de cierre K2 con idéntica misión que el
K1 del circuito 3. Por otra parte en este paso se habrá desconectado
este último, de esta manera se consigue que el relé K2 del circuito 3
sólo actúe en el momento que le corresponde del ciclo.

Paso 4:
En
este paso tiene que volver el cilindro 2A para lo cual se desconecta
el relé K2. Cuando el cilindro 1A llega al inicio de carrera cierra el
contacto 1S1. Además el relé K3 está todavía activado porque 2S2 está
cerrado. Se cumplen así las dos condiciones necesarias para que se
active el relé K4 (figura 7-22).
Como
consecuencia, en el circuito nº 3 el contacto normalmente cerrado de
K4 se abre y se libera la autor retención del relé K2. En el circuito 8
se abre el contacto K2 y se des excita la bobina 2Y. Al ocurrir esto
la válvula vuelve a su posición estable por medio del muelle y el
vástago del cilindro 2A vuelve a su posición de inicio.
Vuelve
todo a la posición inicial. El circuito eléctrico de la Figura 7-22
refleja el circuito tal y como se expresaría para conseguir la secuencia
propuesta.
En
el circuito 6 figura el contacto de cierre K3 con misión idéntica al
K1 del circuito 3 y al K2 del 5. Además en este caso el K2 del 5 se
abrirá, con el fín que el relé K3 solo actúe en su momento.

Interferencias de señales
Se
denomina interferencia de señales, al caso en que cuando se desea
efectuar un movimiento se sigue actuando sobre aquel elemento que
produjo el efecto contrario, es decir se está produciendo una señal
indeseada que interfiere. Esto mismo ha sido estudiado en el capítulo de
neumática 5.3. En el caso de producirse una interferencia el circuito
llega a ese punto y se para, pues no se produce el movimiento deseado.
Para
que no se produzca interferencia es necesario que entre dos
movimientos del mismo cilindro (1A+, 1A- ) exista el movimiento
contrario al que produjo el primero de los dos movimientos (1A+). Por
ejemplo en la secuencia (1A+, 2A+ , 1A- , 2A-), explicada en 7.4, entre
1A+ y 1A- existe
el
movimiento 2A+ que es el movimiento contrario al que produjo 1A+
(2A-). Además entre 2A+ y 2A- existe el movimiento 1A- que es el
contrario al que produjo 2A+ (1A+). Luego no hay interferencias en este
proceso.
Por
otra parte hay que tener en cuenta que un proceso no acaba con su
secuencia, sino que esta vuelve a empezar, por ello la secuencia
anterior debe ser estudiada completa, es decir: (1A+, 2A+ , 1A- , 2A-,
1A+ , 2A+ , 1A- , 2A-, …). En esta secuencia tampoco hay interferencia
entre 1A- y 1A+ ni entre 2A- y 2A+ por análogas razones a las
mencionadas.
Si,
a la inversa, no existe entre dos movimientos contrarios el inverso al
que produjo el primero de los dos movimientos, se forma una
interferencia que será preciso eliminarla de alguna manera.
Por
ejemplo en la secuencia (1A+, 2A+ , 2A-, 1A- ) entre 2A+ y 2A- no hay
ningún movimiento por lo que no se encuentra el movimiento necesario
para que no exista interferencia (1A-), luego la habrá. Si tomamos la
secuencia completa (1A+, 2A+ , 2A-, 1A- , 1A+ , 2A+ , 2A-, 1A- ,…) entre
1A- y 1A+ se producirá otra interferencia por análogas razones.
Otro
caso: (1A-, 2A+ , 2A-, 1A+ , 3A+, 3A-, 1A- , 2A+ , 2A-, 1A+ , 3A+,
3A-, …) existirán interferencias entre 2A+ y 2A-, entre 3A+ y 3A- y
entre 1A- y 1A+ por análogas razones a las ya mencionadas. La
eliminación de las interferencias va a ser explicada mediante los
siguientes ejemplos:
Ejemplo: Fresadora.
Una
fresadora ha de realizar ranuras en un marco de madera. Para resolver
tal problema un cilindro (1A) sujeta el marco para luego mediante una
unidad de avance (2A) realizar la ranura. La secuencia deseada es: 1A+,
2A+, 2A-, 1A-, … El croquis del proceso y el diagrama espacio fase se
muestran en la figura 7-23. En la figura 7-24 se traza el esquema
neumático del proceso.

S1 + 1S1 _ 1A+ 2S2 _ 2A-
1S2 _ 2A+ 2S1 _ 1A-
Esquema neumático.

En
la fase 1 del proceso se desea que comience el movimiento 1A+ estando
pisado el fin de carrera 2S1, que es precisamente el que produjo el
movimiento 1A-. Es decir se pretende que se realice el movimiento 1A+
cuando se está actuando sobre el sensor que produce el movimiento 1A-.
Por
otra parte en la fase 3 se desea conseguir el movimiento 2A- cuando
está pisado el sensor 1S2 que produjo el 2A+, es decir aquí se genera
una segunda interferencia. La solución al problema viene por anular las
señales producidas por los sensores 2S1 y 1S2, aunque se encuentren
accionados por sus respectivos vástagos.
En
las figuras se presentan los esquemas eléctricos que eliminan las
interferencias. La explicación se presenta paso a paso para mayor
facilidad en su comprensión.

Con
el accionamiento de marcha S1 y del final de carrera 1S1 del cilindro
1A se cierra el circuito 1 que excita el relé K1. El contacto de cierre
K1(2) produce la autor retención del relé K1 y el contacto de cierre
K1(3) alimenta la bobina 1Y1 que genera el movimiento 1A+. En el
circuito principal se dispone una segunda línea con un contacto de
apertura K1 (4), de manera que las dos líneas se van a encontrar
conectadas y desconectadas alternativamente.
Cuando el vástago de 1A sale, 1S1 abre sin consecuencia inmediata dado que existe la autor retención por medio del circuito 2.
Cuando
el vástago de 1A llega a su fin de carrera anterior pisa 1S2 que tiene
como consecuencia la excitación de 2Y1 y el movimiento 2A+.

En
el momento en que concluye el movimiento 2A+ se pisa el contacto 2S2,
debiendo tener una consecuencia doble, la excitación de 2Y2 y al mismo
tiempo la des excitación de 2Y1, con el fin de eliminar la
interferencia producida.

Para
ello, como se observa en la, se ha colocado el contacto de apertura
2S2 en la línea 1, de esta manera cuando se actúa sobre dicho contacto
se abre el circuito 1, se desactiva el relé K1 y se elimina su autor
retención. Al mismo tiempo se abre el contacto K1 (3) y se des excitan
1Y1 y 2Y1. Por otra parte, el relé K1 arrastra el contacto de apertura
K1 (4) que en este momento se cierra, activa la línea auxiliar B a la
que está conectada la bobina 2Y2, que se excita y produce el movimiento
2A-.
Cuando
comienza el 2A-, se deja de actuar sobre 2S2 que cierra, sin
consecuencia inmediata. El vástago retrocede hasta su fin de carrera
posterior pisando 2S1, que debe excitar la bobina 1Y2 para que se
produzca el movimiento 1ª.

Para
ello se ubica el contacto 2S1. en serie con la bobina 1Y2, y a su vez
en paralelo con la 2Y2. De esta manera se consigue el efecto deseado.
Cuando el vástago de 1A penetra, deja de actuar sobre 1S2, sin consecuencia inmediata.
En
el instante en que 1A- concluye se actúa sobre 1S1, cerrándose,
acabándose el ciclo y quedando todos los elementos en la posición de
partida.
Por
último hay que observar que cuando el operario vuelva a pulsar S1,
comienza el ciclo cerrándose el circuito 1, excitándose el relé K1,
consiguiendo su autor retención, y lo que es más importante, cerrando el
contacto K1(3) y abriéndose el K1(4).
De
esta manera se alimenta la línea auxiliar A y se desconecta la B,
eliminándose las excitaciones de 2Y2 y 1Y2, y por tanto la interferencia
producida.
Como
resumen hay que observar que las bobinas situadas a la izquierda de
las válvulas, 1Y1 y 2Y1, están conectadas a la línea auxiliar A y las
de la derecha a la B. Estas líneas están activadas alternativamente,
eliminándose así las interferencias.
Muchas definiciones como álgebras booleanas, expresión booleana, entre otras honran a George Boole matemático del siglo XIX cuya propuesta principal está basada en formalizar y mecanizar el proceso de razonamiento lógico. Desarrolla una teoría lógica que utiliza símbolos en lugar de palabras. Tiempo después C.E Shannon en 1938 observo que el álgebra booleana se podía aplicar en el análisis de circuitos eléctricos que posteriormente es utilizado para el diseño y análisis de computadoras electrónicas.
muchas gracias me sirvio mucho
ResponderBorrarnuy buena informacion para mi tarea
ResponderBorrar